1. MCU'nun Temel Kavramı
MCU, Mikrodenetleyici Birimi anlamına gelir. Tek çipli mikrodenetleyici olarak da bilinir. Üniversitelerde incelenen ünlü 8051 mikrodenetleyici, bir MCU'nun klasik bir örneğidir.
1.1 Mikrodenetleyici ve Mikrobilgisayar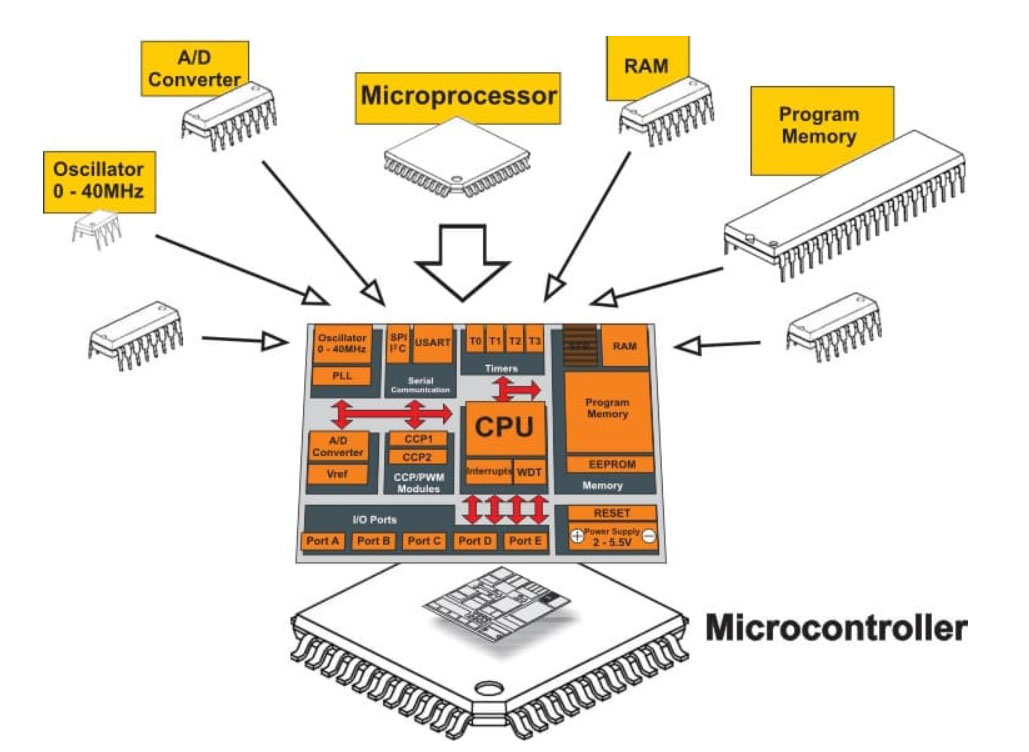
Bir mikrodenetleyici (Tek Çipli Mikrobilgisayar), geleneksel mikrobilgisayarların mimarisinden kaynaklanır. Geleneksel bir mikrobilgisayar şunlardan oluşur:
- CPU (Kontrol Birimi + ALU)
- Bellek (RAM ve sabit diskler gibi harici depolama)
- Giriş/Çıkış aygıtları (klavye, fare, ekran, hoparlörler vb.)
Bu bileşenler genellikle bir anakart üzerindeki harici veri yolları aracılığıyla bağlanan birden fazla bağımsız çip kullanılarak uygulanır. Bu yapı esnek yapılandırmaya olanak tanır, ancak karmaşıklığı, boyutu ve güç tüketimini artırır.
Bir MCU, CPU, bellek ve G/Ç çevre birimlerini tek bir çipe entegre ederek tüm veri işleme ve kontrol işlemlerinin dahili olarak tamamlanmasını sağlar. Bu durum şunlara yol açar:
- Daha yüksek yürütme verimliliği
- Daha düşük maliyet ve güç tüketimi
- Özel, gerçek zamanlı gömülü kontrol sistemleri için uygunluk
1.2 MCU Mimarisi ve Çalışma Prensibi
Bir MCU tipik olarak şunları içerir:
- CPU: Kontrol mantığını ve talimatlarını yürütür
- RAM: Hızlı işlem için geçici veri depolama alanı
- ROM / Flash: Programları ve sabit verileri depolar
- Çevre Birimleri: GPIO, ADC, PWM, UART, SPI, I²C, vb.
Otomotiv MCU'larında, genellikle aşağıdaki gibi ek özel çevre birimleri entegre edilir:
- CAN / LIN / FlexRay kontrolörleri
- LCD sürücüleri
- Motor ve step motor kontrolörleri
Araçlar elektrifikasyona ve zekaya doğru evrildikçe—dijital gösterge panelleri, bilgi-eğlence sistemleri, T-Box bağlantısı ve alan kontrolörlerini kapsayan—basit çevre birimleri aracılığıyla geleneksel MCU genişletmesi artık yeterli değildir. Bu, SoC'lerin benimsenmesini tetikler.
2. SoC'nin Temel Kavramı
SoC (Çip Üzerinde Sistem), birden fazla fonksiyonel modülü tek bir çipe entegre ederek neredeyse eksiksiz bir bilgisayar oluşturan bir sistem anlamına gelir.
Hem MCU'lar hem de SoC'ler tek çipli çözümler olmasına rağmen, tasarım hedefleri temelde farklıdır:
- MCU: Yüksek gerçek zamanlı performansla basit, deterministik kontrol görevleri için tasarlanmıştır.
- SoC: Tam işletim sistemlerini çalıştırabilen ve yüksek performanslı iş yüklerini yönetebilen karmaşık bilgi işlem sistemleri için tasarlanmıştır.
Bu hedef farklılığı, önemli mimari farklılıklara yol açar.
2.1 Tek Çekirdekli ve Çok Çekirdekli Mimari
MCU'lar genellikle şunları içerir:
- Tek çekirdekli veya sınırlı çok çekirdekli mimari
- Cortex-M işlemciler
- Çip üzerinde SRAM ve Flash bellek
- Bellek genellikle < 10 MB
SoC'ler ise, aşağıdakileri içeren heterojen çok çekirdekli mimariler benimser:
- CPU + GPU + DSP + NPU
- DDR bellek desteği (GB seviyesi)
- Zengin multimedya ve kablosuz arayüzler
Tipik bir örnek, birden fazla Cortex-A çekirdeği ve yüksek performanslı bir GPU'yu entegre eden Qualcomm Snapdragon 865 gibi bir akıllı telefon SoC'sidir.
Bazı otomotiv MCU'ları artık çok çekirdekli tasarımlar benimsese de, performans ölçeği ve sistem karmaşıklığı açısından SoC'lerden önemli ölçüde farklılık gösterirler.
2.2 Gerçek Zamanlı Performans ve İşletim Sistemleri
MCU'lar gerçek zamanlı yanıtı önceliklendirir. Birçok MCU tabanlı sistem şu modlarda çalışır:
- Bare-metal modu
- Hafif RTOS (örneğin, FreeRTOS)
Başlangıç süresi tipik olarak on milisaniyedir ve hızlı uyandırma (<100 ms) ve güvenlik açısından kritik yanıt süreleri (örneğin, 200 ms içinde acil frenleme) gibi katı otomotiv gereksinimlerini karşılar.
SoC'ler çoklu görev ve yüksek hesaplama performansı için optimize edilmiştir ve genellikle şu işletim sistemlerini çalıştırır:
Ancak, bu işletim sistemleri daha uzun başlangıç süreleri gerektirir—genellikle birkaç saniye veya daha fazla—bu da onları belirli gerçek zamanlı kontrol görevleri için uygunsuz hale getirir.
Sonuç olarak, modern araçlar genellikle şu özelliklere sahip bir MCU + SoC mimarisi benimser:
- MCU gerçek zamanlı kontrol ve güvenlik fonksiyonlarını yönetir
- SoC karmaşık hesaplama, grafik, yapay zeka ve bağlantı işlemlerini yönetir
2.3 Çevre Birimleri, Hesaplama Gücü ve Güç Tüketimi
MCU'lar genellikle kontrol görevlerine odaklanan sınırlı çevre birimlerini entegre ederken, SoC'ler şunları destekler:
- Yüksek hızlı arayüzler
- Kameralar, ekranlar, ses ve video
- Bluetooth, Wi-Fi, USB
- Gelişmiş yapay zeka hızlandırması ve 5G bağlantısı
SoC'ler genellikle yüzlerce gigabayta ulaşan kapasitelere sahip DDR ve UFS gibi harici bellek ve depolama birimlerine güvenir. Buna karşılık, MCU'lar genellikle KB veya MB cinsinden ölçülen çip üzerinde Flash ve SRAM kullanır.
Güç tüketimi açısından:
- MCU'lar: Mikrowatt seviyesinde, düşük ısı üretimi
- SoC'ler: Watt seviyesinde, gelişmiş güç yönetimi ve termal tasarım gerektirir
Akıllı sürüş ve akıllı kokpitler gibi otomotiv uygulamalarında, SoC'ler çoklu sensör füzyonunu (örneğin, 5 kamera + 5 radar) desteklemek için 20 KDMIPS veya daha fazlasına ihtiyaç duyabilir.
3. Özet
| Özellik |
MCU |
SoC |
| Mimari |
Basit |
Karmaşık, çok çekirdekli |
| Başlangıç Süresi |
Çok hızlı |
Nispeten yavaş |
| Gerçek Zamanlı Performans |
Mükemmel |
Sınırlı |
| İşletim Sistemi |
Bare-metal / RTOS |
Linux / QNX / Android |
| İşlem Gücü |
Düşük ila orta |
Çok yüksek |
| Güç Tüketimi |
Çok düşük |
Yüksek |
MCU'lar gerçek zamanlı kontrol ve güvenlik açısından kritik görevler için idealdir, SoC'ler ise yüksek performanslı hesaplama ve karmaşık sistem entegrasyonunda üstünlük sağlar.
MCU, SoC ve Elektrikli Araç Şarj Sistemleri
Modern elektrikli araçlarda, hem MCU'lar hem de SoC'ler sadece sürüş ve kokpit sistemlerinde değil, aynı zamanda elektrikli araç şarj kontrolü ve güç yönetiminde de kritik roller oynar. Şarj kontrol üniteleri, BMS üniteleri ve iletişim modülleri gibi bileşenler gerçek zamanlı kontrol için MCU'lara güvenirken, SoC'ler bağlantı, bulut etkileşimi ve akıllı enerji yönetimi sağlar.
Elektrikli araç şarj çözümlerinde uzmanlaşmış bir şirket olarak nexwayev, gelişmiş otomotiv elektroniği ekosistemleriyle yakından çalışmaktadır.
Tip 2 elektrikli araç uzatma kablosu da dahil olmak üzere ürünlerimiz, akıllı elektrikli araçların taleplerini karşılamak üzere tasarlanmıştır. Profesyonel
elektrikli araç şarj kablosu tedarikçilerinden biri olarak nexwayev, yeni nesil araç mimarileriyle uyumlu, güvenilir, güvenli ve yüksek performanslı şarj çözümlerini desteklemektedir.
